ProfControl多车交通管制
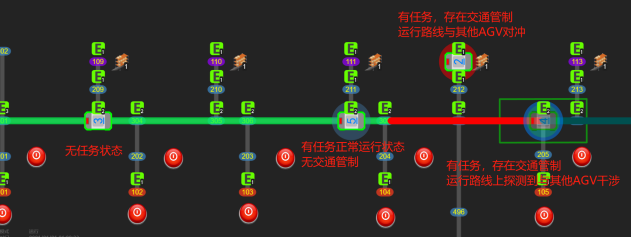
ProfControl调度系统在为每台AGV生成任务后,会自动生成任务路线,一方面便于查询AGV的导航路线,同时调度系统也会根据导航路线进行几何碰撞运算,计算AGV之间运行过程中是否需要进行交通管制,以防止发生运行路线堵塞或碰撞。
管制的距离长度亦可随使用者随意调整,管制的状态也会较为明显地体现在AGV图元上,便于用户辨别AGV当前的运行状态。
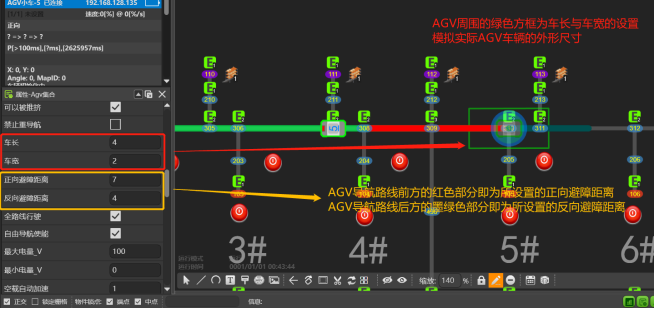
AGV运行中会根据正向避障距离路线探测与其他AGV的运行路线以及AGV车体轮廓来计算是否存在干涉,若存在干涉即对AGV进行管制停车。
同时AGV处于不同的管制状态下会呈现不同的圆环底色,便于观察区分。